题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
在P2x2中定义线性变换求在基E11,E12,E21,E22下的矩阵。
在P2x2中定义线性变换
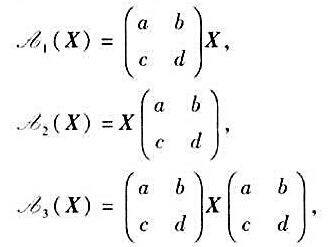
求 在基E11,E12,E21,E22下的矩阵。
在基E11,E12,E21,E22下的矩阵。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在P2x2中定义线性变换
求在基E11,E12,E21,E22下的矩阵。
如果结果不匹配,请 联系老师 获取答案
 更多“在P2x2中定义线性变换求在基E11,E12,E21,E22…”相关的问题
更多“在P2x2中定义线性变换求在基E11,E12,E21,E22…”相关的问题
在R3中定义线性变换σ为
σ(x1,x2,x3)=(2x1-x2,x2+x3,x1)
(1)求σ在基ξ1=(1,0,0),ξ2=(0,1,0),ξ3=(0,0,1)下的矩阵;
(2)设α=(1,0,-2),求σ(α)在基α1=(2,0,1),α2=(0,-1,1),α3=(-1,0,2)下的坐标.
(3)σ是否可逆,若可逆,求σ-1.
给定R3的两组基ε1=(1,0,1)T,ε2=(2,1,0)T,ε3=(1,1,1)T和η1=(1,2,-1)T,η2=(2,2,-1)T,η3=(2,-1,-1)T.
定义线性变换:σ(εi)=ηi(i=1,2,3),分别求σ在基ε1,ε2,ε3与η1,η2,η3下的矩阵。
在P3中线性变换A在基η1=(-1,1,1),η2=(1,0,-1),η3=(0,1,1)下的矩阵是 ,求A在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵.
,求A在基ε1=(1,0,0),ε2=(0,1,0),ε3=(0,0,1)下的矩阵.
设ε1,ε2,ε3,ε4是四维线性空间V的一组基,线性变换 在这组基下的矩阵为
在这组基下的矩阵为
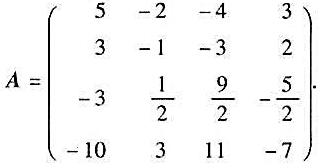
1)求在基
下的矩阵;
2)求的特征值与特征向量;
3)求一可逆矩阵T,使T-1AT成对角形。
设R3的线性变换σ,对于基α1=(1,0,0)T,α2=(1,1,0)T,α3=(1,1,1)T,有
σ(α1)=(2,3,5)T,σ(α2)=(1,0,0)T,σ(α3)=(0,1,-1)T,求:
欧氏空间V中的线性变换 称为反称的,如果对任意,α,β∈V,
称为反称的,如果对任意,α,β∈V, 证明:
证明:
1) 为反称的充分必要条件是,在一组标准正交基下的矩阵为反称的;
为反称的充分必要条件是,在一组标准正交基下的矩阵为反称的;
2)如果V1是反称线性变换的不变子空间,则 也是。
也是。
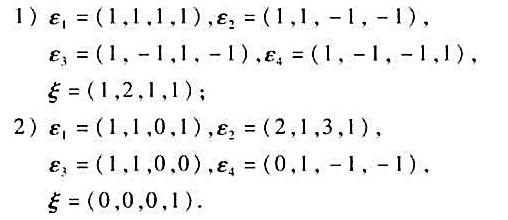
在R4中取两个基
 (1)求由前一个基到后一个基的过渡矩阵.
(1)求由前一个基到后一个基的过渡矩阵.
(2)求向量(x1,x2,x3,x4)T在后一个基下的坐标.
(3)求在两个基下有相同坐标的向量.
设巴拿赫空间E'具有基{xn}(n=1,2,3,…)。证明:
(1){xn}是线性无关的;
(2)令W为使∑n=1∞cnxn在E中收敛的序列w={xn}的全体,在W中定义范数
则W为巴拿赫空间;
(3)令fn(x)=cn(n=1,2,3,…),这里x=n=1∞cnxn则fn是E上的有界线性泛函。
在R3中,己知向量a在基 下的坐标为
下的坐标为 ,向量β在基
,向量β在基 下的坐标为(0,-1,1)',求:
下的坐标为(0,-1,1)',求:
(1)由基 到基
到基 的过渡矩阵;
的过渡矩阵;
(2)向量a+β在基下的坐标。