 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统开环传递函数为: G(s)H(s)=1/s(2s+1)(3s+1)用奈奎斯特图判据判断闭环系统的稳定性。
已知系统开环传递函数为: G(s)H(s)=1/s(2s+1)(3s+1)用奈奎斯特图判据判断闭环系统的稳定性。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统开环传递函数为: G(s)H(s)=1/s(2s+1…”相关的问题
更多“已知系统开环传递函数为: G(s)H(s)=1/s(2s+1…”相关的问题
A.φ(s)/(1+φ(s))
B.φ(s)/(1-φ(s))
C.(1+φ(s))/φ(s)
D.(1-φ(s))/φ(s)
已知控制系统的内环正反馈回路的开环传递函数是G(s)H(s)=K(5+3)/s^2(s+1)(s+9),内环回路根轨迹在实轴上的根轨迹是()。
A.[-1,0]
B.[-9,-3]
C.[0,+∞]
D.[-3,-1]
E.[-∞,-9]
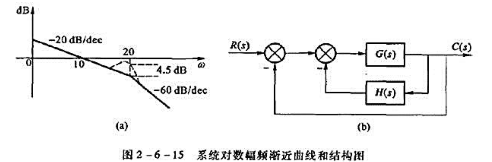
系统开环传递函数G(s)没有右半平面的零、极点,其对应的对数幅频渐近曲线如图2-6-15所示。若采用加内反馈校正的方法,消除开环幅频特性中的谐振峰,试确定校正装置的传递函数H(s)。
A.I型系统
B.limQ(0)→-270°
C.0型系统
D.开环增益为100
单位反馈系统的开环传递函数为G(s)=K/s(s+1)(s+5),输入为斜坡函数,试求当系统的稳态误差ess=0.01时的K值。
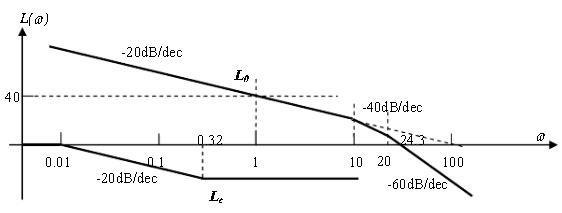
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
A、稳定性降低
B、频宽降低
C、阶跃输入误差增大
D、阶跃输入误差减小


















