

 如果结果不匹配,请
如果结果不匹配,请 
 更多“已知系统的闭环特征方程如下,试绘制K从0→+∞变化时,系统的…”相关的问题
更多“已知系统的闭环特征方程如下,试绘制K从0→+∞变化时,系统的…”相关的问题
第2题
设系统的闭环特征方程如下当a取不同值时,系统的根轨迹(0<K<∞)是不同的。若出现根轨迹有一个、有
设系统的闭环特征方程如下

当a取不同值时,系统的根轨迹(0<K<∞)是不同的。若出现根轨迹有一个、有两个和没有分离点三种情况,试分别确定每种情况下a的范围,并作出其根轨迹图。
第5题
设单位负反馈控制系统的开环传递函数为试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和
设单位负反馈控制系统的开环传递函数为
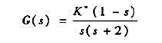
试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和纯虚根的K*值。
第6题
设一维系统的状态方程和观测方程为 xk+1=2xk+ωk zk=xk+vk 设ωk和vk都是均值为零的白噪声,有关的统计特性
设一维系统的状态方程和观测方程为
xk+1=2xk+ωk
zk=xk+vk
设ωk和vk都是均值为零的白噪声,有关的统计特性还有
E(x0)=0,E(
已知观测值z0=0,z1=4,z2=3,z3=2。 试求
第7题
当ω从0到+∞变化时的系统开环频率特性G(jω)H(jω)如题4图所示。K表示开环增益。Р表示开环系统极点在右半平面上的数目。v表示系统含有的积分环节的个数。试确定闭环系统稳定的K值的范围。
第8题
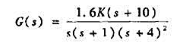
已知反馈控制系统的开环传递函数为: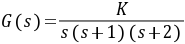
问题一:绘制该系统的根轨迹。
问题二:绘制K=7时的开环频率特性(Nyquist曲线草图),并应用Nyquist稳定判据说明K=7时闭环系统的稳定性。
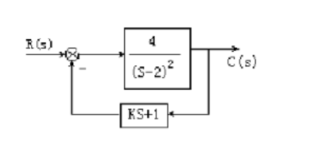
 ,试确定使闭环系统稳定的T和K的范围。
,试确定使闭环系统稳定的T和K的范围。第11题
已知系统的开环传递函数分别为试绘制伯德图,求相位裕度及增益裕度,并判断闭环系统的稳定性。
已知系统的开环传递函数分别为
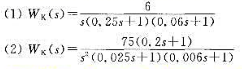
试绘制伯德图,求相位裕度及增益裕度,并判断闭环系统的稳定性。
















