题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
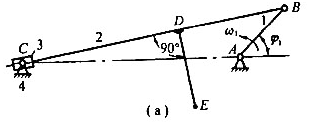
在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时
在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3的角速度和角加速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3的角速度和角加速度。
如果结果不匹配,请 联系老师 获取答案
 更多“在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度…”相关的问题
更多“在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度…”相关的问题
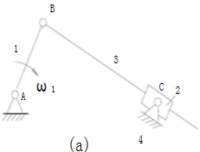
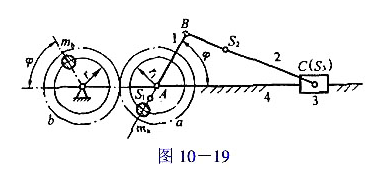
在图10-19所示曲柄滑块机构的平衡装置中(单轴平衡机构),已知各构件的尺寸和质量如下:lAB=l00mm,lBC=400mm,lAS1=30mm,lBS2=100mm, =0,r=50m;m1=25kg,m2=l0kg及m3=30kg.齿轮a和b的大小相等.求为了平衡该机构所有回转质量的全部惯性力和往复质量的第一级惯性力而必须装在a、b两轮上的平衡质量ma和mb.
=0,r=50m;m1=25kg,m2=l0kg及m3=30kg.齿轮a和b的大小相等.求为了平衡该机构所有回转质量的全部惯性力和往复质量的第一级惯性力而必须装在a、b两轮上的平衡质量ma和mb.
在图9-1所示机构中,已知:x=250mm,y=200mm,lAS2=128mm,F为驱动力,Q为有效阻力.m1=m3=2.75kg,m2=4.59kg,Js2=0.0l2kg·m2,又原动件3以等速v=5m/s向下移动,试确定作用在各构件上的惯性力.
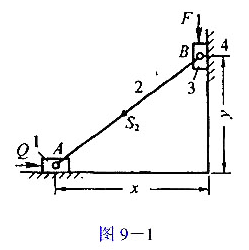
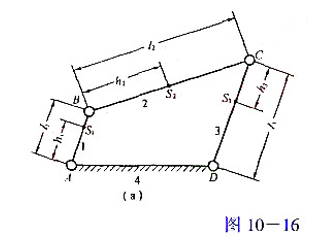
图10-16(a)所示铰链四杆机构中,已知构件1、2、3的长度为:l1=100mm,l2=300mm,l3=200mm;质量为:m1=1kg,m2=3kg、m3=2kg;其质心S1,S2,S3,的位置尺寸分别为:h1=75mm,h2=150mm,h3=120mm.今要求该机构达到惯性力完全平衡,试设计增加平衡质量的方案,并计算它们质径积的大小和方位.
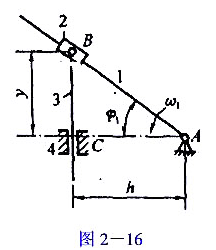
在图2-16所示的正切机构中,已知 1=30°,构件1的等角速度
1=30°,构件1的等角速度 1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
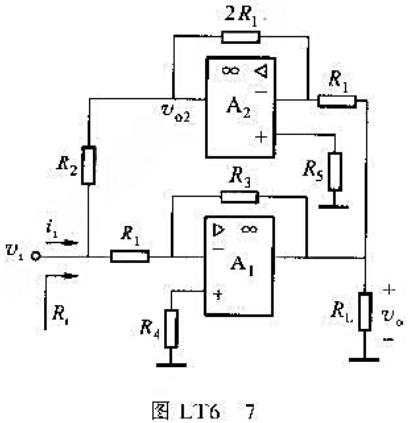
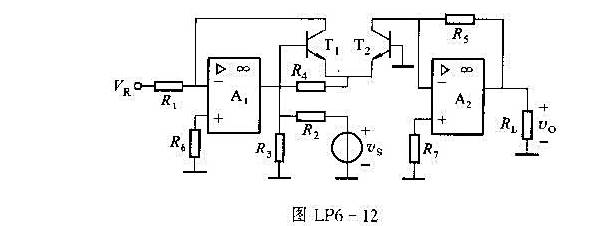
在图LP6-12所示的反对数变换器中,试证: ,其中τ=(R2+R3)/R3VT.已知VR=7V,R1=10kΩ,R2=15.7kΩ,R3=1kΩ,R5=10kΩ,试问:当υs由1mV变到10V时,在室温下相应υ0的变化范围是多少?
,其中τ=(R2+R3)/R3VT.已知VR=7V,R1=10kΩ,R2=15.7kΩ,R3=1kΩ,R5=10kΩ,试问:当υs由1mV变到10V时,在室温下相应υ0的变化范围是多少?
设各集成运放是理想的,各晶体管特性相同.
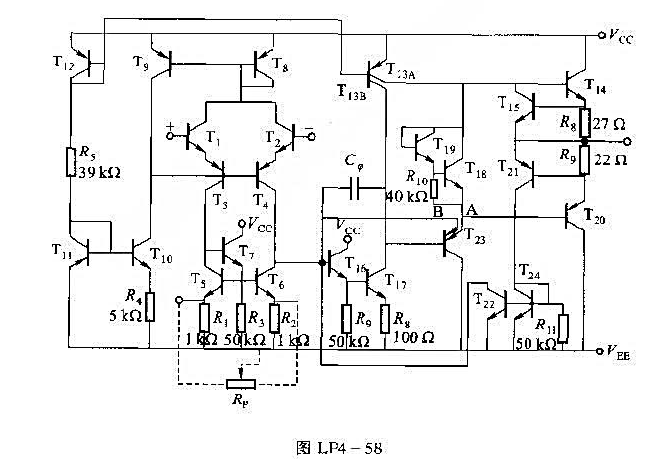
体三极管的|VA|均为100V,|VBE(on)|=0.7V,并设T23的输入电阻为9.1MΩ,IC17=550μA,|VCC|=|VEE|=15V,试求T16、T17组成的中间增益级的输入电阻R1和电压增益Av。
(2)利用上题提供的管子参数,试求F007集成运放内部电路中输入差分级电路的输入电阻Rid和互导增益Ag。设各管rce忽略不计。已知差分放大器的偏置电流为20μA。
在图LP4-8所示的多级直接耦合放大器中,第二级为电平位移电路.已知各管的β=100, 可忽略不计.各管的
可忽略不计.各管的 (1)为使
(1)为使 试确定RF2值;(2)若RF2=0,电路能否正常工作?
试确定RF2值;(2)若RF2=0,电路能否正常工作?

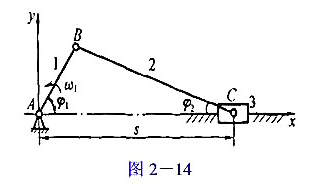
在图2-14所示曲柄滑块机构中,已知lAB=100mm,lBC=330mm,n1=1500r/min, 1=60°,试用解析法求滑块的速度和加速度.
1=60°,试用解析法求滑块的速度和加速度.
在图2-9(a)所示的曲柄摇块机构中,lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm, 1=45°,等角速度
1=45°,等角速度 1=10rad/s,求点E、D的速度和加速度,构件3的角速度和交加速度.
1=10rad/s,求点E、D的速度和加速度,构件3的角速度和交加速度.