
 如果结果不匹配,请
如果结果不匹配,请 
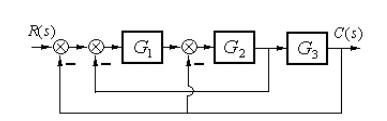
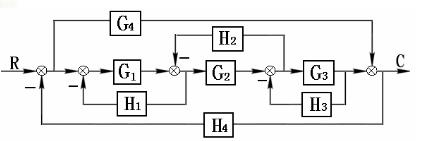
 更多“试用结构图等效化简求下图所示各系统的传递函数”相关的问题
更多“试用结构图等效化简求下图所示各系统的传递函数”相关的问题

第4题
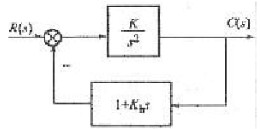
设系统结构图如下图所示。为使闭环极点位于s,试确定增益K和速度反馈系数Kh的值,并以计算得到的K及Kh值为基准
设系统结构图如下图所示。为使闭环极点位于 ,试确定增益K和速度反馈系数Kh的值,并以计算得到的K及Kh值为基准值.
,试确定增益K和速度反馈系数Kh的值,并以计算得到的K及Kh值为基准值.
第5题
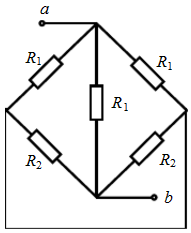
求图所示各电路的等效电阻Rab,其中R1=R2=1Ω,R3=R4=2Ω.R5=4Ω,G1=G2=1S,R=2Ω。
求图所示各电路的等效电阻Rab,其中R1=R2=1Ω,R3=R4=2Ω.R5=4Ω,G1=G2=1S,R=2Ω。

 作用于系统时,求系统的扰动稳态误差。
作用于系统时,求系统的扰动稳态误差。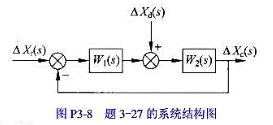
第7题
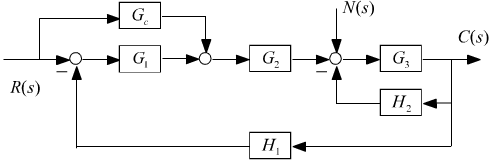
已知系统结构图如图2-2-18所示。①求传递函数C(s)/R(s) ,C(s)/N(s)。②若要消除N(s)的影响,C4
已知系统结构图如图2-2-18所示。
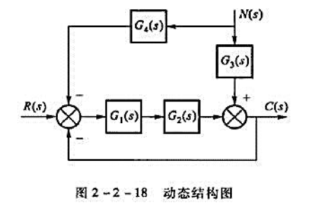
①求传递函数C(s)/R(s) ,C(s)/N(s)。
②若要消除N(s)的影响,C4(s) =?
第8题
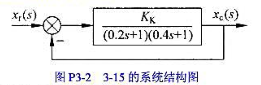
一系统的动态结构图如图P3-2所示,求在不同的Kk值下(例如,KK=1, Kk=3, Kk=7
一系统的动态结构图如图P3-2所示,求在不同的Kk值下(例如,KK=1, Kk=3, Kk=7)系统的闭环极点、单位阶跃响应、动态性能指标及稳态误差。
第9题
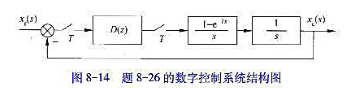
数字控制系统结构图如图8-14所示,采样周期T=1s。(1)试求未校正系统的闭环极点,并判断其稳定性。
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
第10题
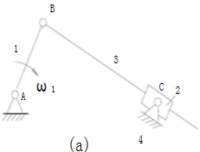
在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时
在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3的角速度和角加速度。
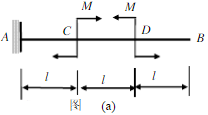
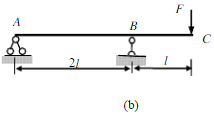
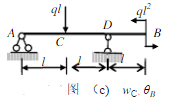
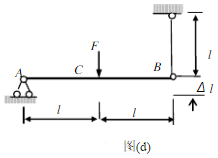
第11题
对于下图所示各梁,要求: (1)写出用积分法求梁变形时的已知位移条件即边界条件和位移连续条件。 (2)根据梁
对于下图所示各梁,要求:
(1)写出用积分法求梁变形时的已知位移条件即边界条件和位移连续条件。
(2)根据梁的弯矩图和支座条件,画出梁的挠曲线的大致形状。