 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某一系统{N(t);t≥0},顾客进入系统服从参数为λ的最简单流。在系统中只有一个顾客时,服务时间服从
某一系统{N(t);t≥0},顾客进入系统服从参数为λ的最简单流。在系统中只有一个顾客时,服务时间服从参数为μ1的负指数分布。当系统中多于一个顾客时,服务时间服从参数为μ2(μ2<μ1,λ/μ2=ρ<1)的负指数分布。
(1)试证明系统{N(t);t≥0}组成生灭过程,并求出pn,p0,L,Lq,W,Wq的公式。
(2)在第(1)题中,给出λ=0.5(人/分),μ1=1.5(人/分),μ2=1(人/分)。求出p0,p1,p2,L,Lq,W,Wq。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“某一系统{N(t);t≥0},顾客进入系统服从参数为λ的最简…”相关的问题
更多“某一系统{N(t);t≥0},顾客进入系统服从参数为λ的最简…”相关的问题
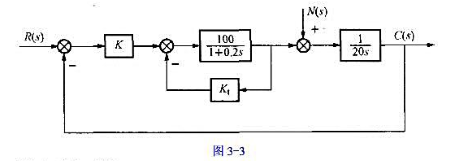
 ;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;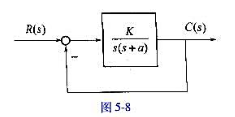

 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
 ,得到如下简化的线性方程
,得到如下简化的线性方程
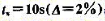
 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.
 其中A的逆矩阵为B,则a=_____
其中A的逆矩阵为B,则a=_____















