的表达式.
的表达式.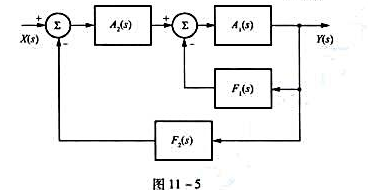

 如果结果不匹配,请
如果结果不匹配,请 
 更多“试写出图11-5所示互联系统的系统函数的表达式.”相关的问题
更多“试写出图11-5所示互联系统的系统函数的表达式.”相关的问题

第3题
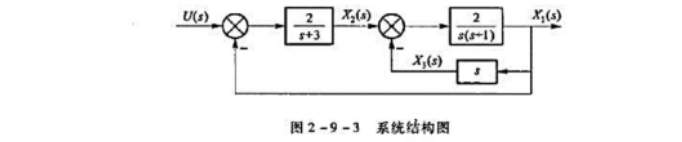
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确定该系统是否完全可控和完全可观测。
第4题
某未知物分子式为谱如图9-14所示,试推断其结构,并写出推理过程,各标号峰的归属及自旋系统。
某未知物分子式为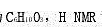 谱如图9-14所示,试推断其结构,并写出推理过程,各标号峰的归属及自旋系统。
谱如图9-14所示,试推断其结构,并写出推理过程,各标号峰的归属及自旋系统。
第5题
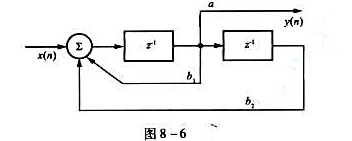
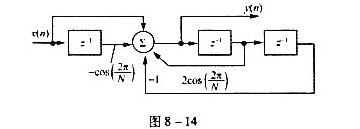
求图8-14所示系统的差分方程、系统函数及单位样值响应.并大致画出系统函数H(z)的零、极点分布图
求图8-14所示系统的差分方程、系统函数及单位样值响应.并大致画出系统函数H(z)的零、极点分布图
点击查看答案
及系统的幅度响应.
第6题
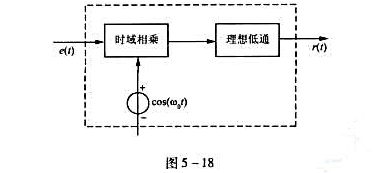
在图5-18所示系统中是自激振荡器,理想低通滤波器的转移函数为(1)求虚框内系统的冲激响应h(t);
在图5-18所示系统中是自激振荡器,理想低通滤波器的转移函数为(1)求虚框内系统的冲激响应h(t);
点击查看答案
在图5-18所示系统中 是自激振荡器,理想低通滤波器的转移函数为
是自激振荡器,理想低通滤波器的转移函数为

(1)求虚框内系统的冲激响应h(t);
(2)若输入信号为 求系统输出信号r(t);
求系统输出信号r(t);
(3)若输入信号为 求系统输出信号r(t);
求系统输出信号r(t);
(4)虚框所示系统是否是线性时不变系统?
 在s平面示出其零、极点分布.
在s平面示出其零、极点分布.
第9题
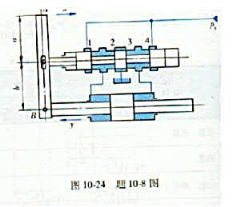
图10-24所示为四通伺服阀控制的机液伺服控制系统,试阐述工作原理,画出系统的框图,并求出其x输
图10-24所示为四通伺服阀控制的机液伺服控制系统,试阐述工作原理,画出系统的框图,并求出其x输入输出y之比。