 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
损失函数L(y)=k(y-m)2=kσ2中:m为()。
A.比例常数
B.实际的质量特性值
C.理想的目标值
D.质量波动的标准差
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.比例常数
B.实际的质量特性值
C.理想的目标值
D.质量波动的标准差
如果结果不匹配,请 联系老师 获取答案
 更多“损失函数L(y)=k(y-m)2=kσ2中:m为()。”相关的问题
更多“损失函数L(y)=k(y-m)2=kσ2中:m为()。”相关的问题
阅读下列对正整数关键字序列L操作的算法,并回答问题:
(1)设L=(28,19,27,49,56,12,10,25,20,50),写出f33(L,4)的返回值;
(2)简述函数f33的功能。
int Partition(SeqList*L,int low,int high);
//对L[low…high]做划分,返回基准记录的位置,并使左部的关键字
//都小于或等于基准记录的关键字,右部的关键字都大于基准记录的关键字
int f33(SeqList L,int k){
int low,high,pivotpos;
low=1;
high=L.length;
if(k<low||k>high)
return-1;
do {
pivotpos=Partition(&L,low,high);//调用快速排序的划分算法
if(pivotpos<k)
low=pivotpos+1;
else if(pivotpos>k)
high=pivotpos-1;
}while(pivotpos!=k);
return L.data[pivotpos];
}
反馈系统的开环系统函数表达式为

(1)画出根轨迹;(2)为保证系统稳定求K值范围.
图4-62所示反馈电路,其中Kv2(t)是受控源.
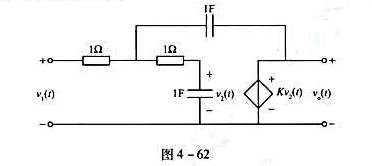
(1)求电压转移函数
(2)K满足什么条件时系统稳定?
(1)求函数 在约束条件
在约束条件 下的极大值,其中k,a,b,c均为正常数;
下的极大值,其中k,a,b,c均为正常数;
(2)利用(1)的结果证明:对于任何正数u,v,w,成立不等式

(I)利用I型线性相位滤波器的幅度函数的特性

试证明II型线性相位滤波器在M+1个取样点值满足
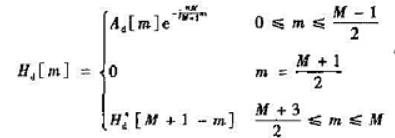
(2)试推导h[k]的表达式,并证明h[k]满足线性相位条件。
已知系统函数

(1)写出对应的差分方程;
(2)画出该系统的结构图;
(3)求系统的频率响应,并画出k=0,0.5,1三种情况下系统的幅度响应和相位响应.
A.l=49.999 926 mm±36.4 nm
B.l=49.999 926 mm,U(l)=73 nm(k=2)
C.l=(49.999 93±0.000 08)mm(k=2)
D.l=49.999 926 mm,U(l)=8×10-5 mm(k=2)
E.l=49.999 926 mm,u(l)=36.4 nm
反馈系统的开环系统函数表达式为

(1)画出根轨迹;
(2)求两分支的交点值;
(3)要使闭环系统的冲激响应不呈现振荡,求K值范围.
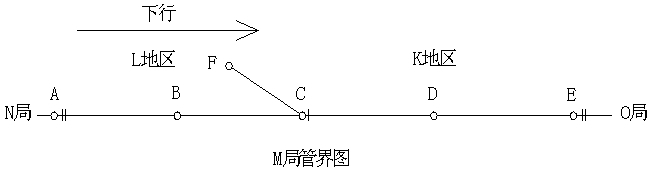
本局汇总的重车车流表如下:
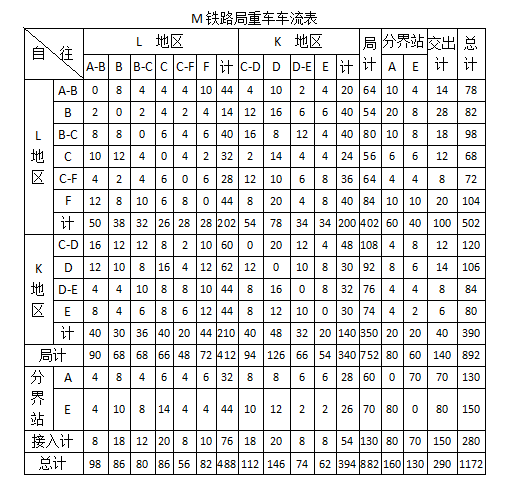
要求:(1)分别计算M铁路局的工作量u、L地区工作量uL、K地区的工作量uK;局管内工作车工作量u管内,L地区管内工作车工作量 、K地区的管内工作车工作量
、K地区的管内工作车工作量 ;局移交车工作量u移交。
;局移交车工作量u移交。
(2)分别计算M铁路局管内装卸率k管、管内工作车装卸率K'管、移交车管内装卸率K''管。

















