题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
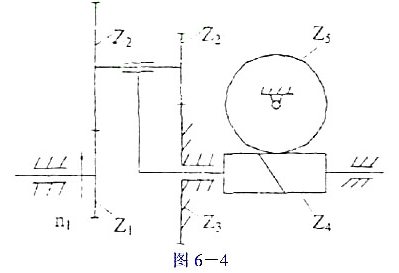
在如图6-14所示轮系中,已知双头蜗杆逆时针方向旋转,z2=46,z3=80,z4=30,z5=20
,z6=70.求i16并在图上示出齿轮6的旋转方向.
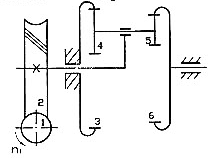
图6-14
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
图6-14
如果结果不匹配,请 联系老师 获取答案
 更多“在如图6-14所示轮系中,已知双头蜗杆逆时针方向旋转,z2=…”相关的问题
更多“在如图6-14所示轮系中,已知双头蜗杆逆时针方向旋转,z2=…”相关的问题
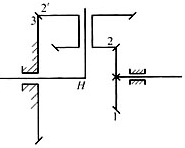
在下图所示的轮系中,已知双头右旋蜗杆的转速n1=900r/min,转向如图所示,z2=60,z2'=25,z3=20,z3'=25,z4=20。求n4的大小与方向。
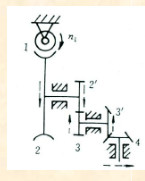

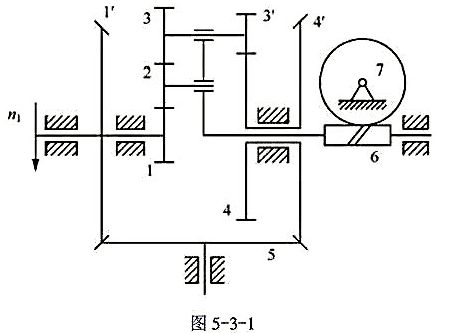
如图5-3-1所示轮系,已知各齿轮均为标准齿轮,且齿轮1,4的模数相同,各轮齿数为 并指出轮7的转向。
并指出轮7的转向。
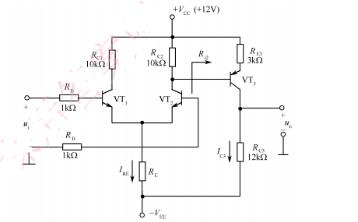
单入单出差动放大电路如图6-14所示。已知三极管的β1=β2=50,β3=80, rbb'=100Ω,UBE1=UBE2=0.7V,UBE3=-0.2V,UCC=12V,-UEE=-12V,Rb=1kΩ,Rc1=Rc2=10kΩ,Rc3=12kΩ,Re3=3kΩ。当输入信号Ui=0时,测得输出Uo=0。
(1) 估算VT1、VT2管的工作电流Ic1、Ic2和电阻Re的大小;
(2) 当Ui=10mV时,估算输出Uo的值;
(3) 若要在VT2管的集电极得到最大的不失真的输出幅度Uo2m,对应的Ui的有效值为多少?
在下图所示的轮系中,设各轮的模数均相同,且为标准传动,若已知z1=z2'=z3'=z6'=20、z2=z4=z6=z7=40。试问:
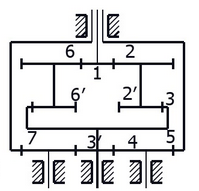
在下图所示轮系中,已知n1=200r/min,z1=20,z3=80,z4=42,z7=40。z5=18,z620,试求轮3的转速n3。

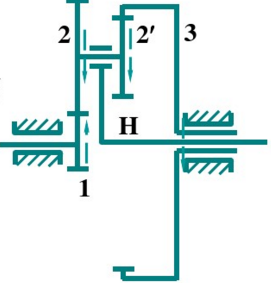
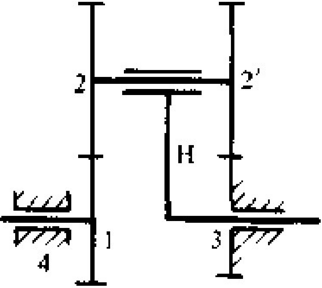
在图所示的锥齿轮行星轮系中,各轮齿数Z1=20,z2=30,Z'2=50,Z3=80,已知n1=100r/min,试求行星架的转速nH。
在图所示的大传动比行星轮系中,已知各齿轮的齿数为z1=100,z2=101, 试求原动件H对从动件1的传动比iH1。
试求原动件H对从动件1的传动比iH1。
在图所示的行星轮系中,各轮齿数分别为Z1=15,Z2=25,Z2'=20,Z3=60,已知n1=200r/min,n3=50r/min,转向见图。试求行星架H的转速。