 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
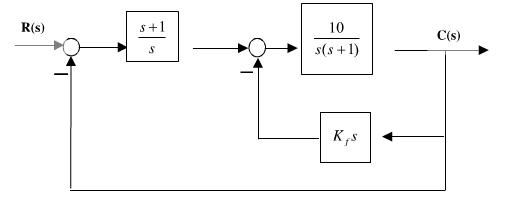
设控制系统的传递函数方框图为图(题5.9)。(1)分析说明内反馈K∫s的存在对系统稳定性的影响。(2)计
设控制系统的传递函数方框图为图(题5.9)。(1)分析说明内反馈K∫s的存在对系统稳定性的影响。(2)计
设控制系统的传递函数方框图为图(题5.9)。
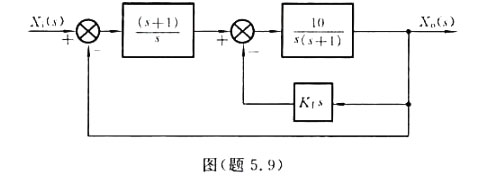
(1)分析说明内反馈K∫s的存在对系统稳定性的影响。
(2)计算系统在位置输入、单位速度输入和单位加速度输入作用下的稳态误差系数,并说明内反馈K∫s的存在对系统稳态误差的影响。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“设控制系统的传递函数方框图为图(题5.9)。(1)分析说明内…”相关的问题
更多“设控制系统的传递函数方框图为图(题5.9)。(1)分析说明内…”相关的问题
 ,H(s)=1
,H(s)=1
 。
。
 。
。 (1)确定使闭环系统具有
(1)确定使闭环系统具有 及的k值和t值;(2)计算系统响应阶跃输入时的超调量
及的k值和t值;(2)计算系统响应阶跃输入时的超调量 和峰值时间
和峰值时间 ;(3)欲使系统完全不受
;(3)欲使系统完全不受 扰动的影响,请确定扰动补偿环节的传递函数
扰动的影响,请确定扰动补偿环节的传递函数 。
。















