

 如果结果不匹配,请
如果结果不匹配,请 
 更多“过阻尼二阶系统在单位阶跃函数作用下不存在稳态误差,其阻尼比越…”相关的问题
更多“过阻尼二阶系统在单位阶跃函数作用下不存在稳态误差,其阻尼比越…”相关的问题
第4题
设f为(-∞,+∞)上的二阶可导函数,若f在(-∞,+∞)上有异,则存在ξ∈(-∞,+∞),使
设f为(-∞,+∞)上的二阶可导函数,若f在(-∞,+∞)上有异,则存在ξ∈(-∞,+∞),使

第7题
设f(x)在[-a,a](a>0)上二阶连续可导,且f(0)=0。(1)写出f(x)的带拉格朗日余项的一阶麦克劳林公式
设f(x)在[-a,a](a>0)上二阶连续可导,且f(0)=0。(1)写出f(x)的带拉格朗日余项的一阶麦克劳林公式
点击查看答案
设f(x)在[-a,a](a>0)上二阶连续可导,且f(0)=0。
(1)写出f(x)的带拉格朗日余项的一阶麦克劳林公式;
(2)证明:存在η∈[-a,a],使得 。
。
第8题
控制系统的结构如图3-3所示。(1)当输入r(t)为单位阶跃函数,n(t)=0时,试选择K和Kt,使得闭环
控制系统的结构如图3-3所示。
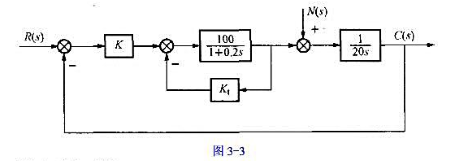
(1)当输入r(t)为单位阶跃函数,n(t)=0时,试选择K和Kt,使得闭环系统的超调虽σ%=40%,调整时间 ;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
(2)设干扰n(t)=0,输入r(t)=t,试问K和Kt之值对稳态误差有何影响?
(3)设输入r(t)=0。当干扰n(t)为单位阶跃函数时,K和Kt之值对稳态误差有何影响?
















