题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
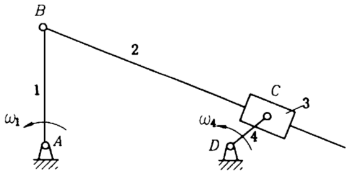
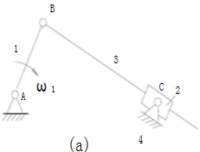
图所示机构中,已知机构尺寸lAB=50mm,lBC=100mm,lCD=20mm,角速度ω1=ω4=20rad/s。试用相对运动矢量方程图解法
图所示机构中,已知机构尺寸lAB=50mm,lBC=100mm,lCD=20mm,角速度ω1=ω4=20rad/s。试用相对运动矢量方程图解法求图示位置时构件2的角速度ω2和角加速度ε2的大小和方向。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
图所示机构中,已知机构尺寸lAB=50mm,lBC=100mm,lCD=20mm,角速度ω1=ω4=20rad/s。试用相对运动矢量方程图解法求图示位置时构件2的角速度ω2和角加速度ε2的大小和方向。
如果结果不匹配,请 联系老师 获取答案
 更多“图所示机构中,已知机构尺寸lAB=50mm,lBC=100m…”相关的问题
更多“图所示机构中,已知机构尺寸lAB=50mm,lBC=100m…”相关的问题
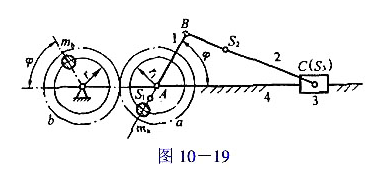
在图10-19所示曲柄滑块机构的平衡装置中(单轴平衡机构),已知各构件的尺寸和质量如下:lAB=l00mm,lBC=400mm,lAS1=30mm,lBS2=100mm, =0,r=50m;m1=25kg,m2=l0kg及m3=30kg.齿轮a和b的大小相等.求为了平衡该机构所有回转质量的全部惯性力和往复质量的第一级惯性力而必须装在a、b两轮上的平衡质量ma和mb.
=0,r=50m;m1=25kg,m2=l0kg及m3=30kg.齿轮a和b的大小相等.求为了平衡该机构所有回转质量的全部惯性力和往复质量的第一级惯性力而必须装在a、b两轮上的平衡质量ma和mb.
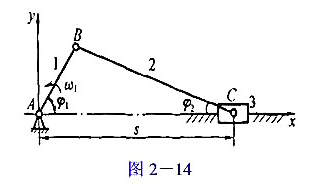
在图2-14所示曲柄滑块机构中,已知lAB=100mm,lBC=330mm,n1=1500r/min, 1=60°,试用解析法求滑块的速度和加速度.
1=60°,试用解析法求滑块的速度和加速度.
在图(a)所示机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3的角速度和角加速度。
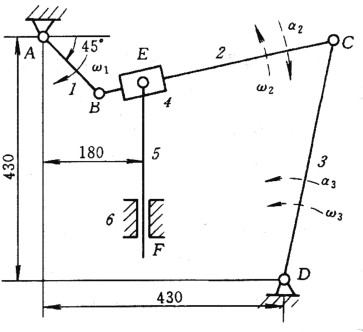
在图2-9(a)所示的曲柄摇块机构中,lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm, 1=45°,等角速度
1=45°,等角速度 1=10rad/s,求点E、D的速度和加速度,构件3的角速度和交加速度.
1=10rad/s,求点E、D的速度和加速度,构件3的角速度和交加速度.
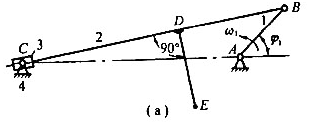
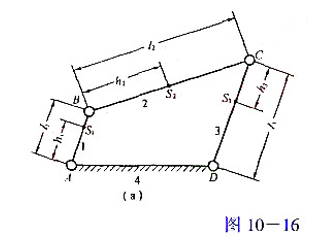
图10-16(a)所示铰链四杆机构中,已知构件1、2、3的长度为:l1=100mm,l2=300mm,l3=200mm;质量为:m1=1kg,m2=3kg、m3=2kg;其质心S1,S2,S3,的位置尺寸分别为:h1=75mm,h2=150mm,h3=120mm.今要求该机构达到惯性力完全平衡,试设计增加平衡质量的方案,并计算它们质径积的大小和方位.
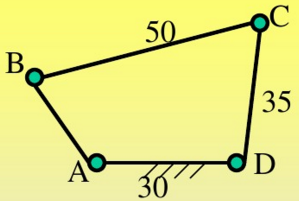
下图所示机构的构件长度为:lBC=50mm,lCD=35mm,lAD=40mm,欲使该机构成为曲柄摇杆机构,则构件AB的长度lAB不可取的尺寸范围为( )。
A.0<lAB≤25 B.45≤lAB≤50 C.50≤lAB≤55 D.25<lAB<45

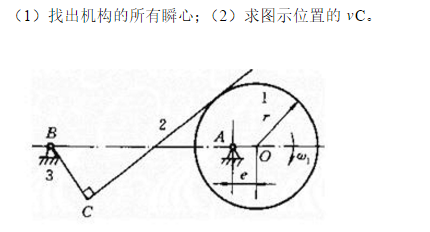
图(a)所示,为摆动从动件形凸轮机构,凸轮为一偏心圆盘,其半径r=30mm,偏距e=10mm,lAB=90mm,lBC=30mm,ω1=20rad/s。要求:
图(a)所示铰链四杆机构中,已知lBC=50mm,lDC=35mm,lAD=30mm,试求:
在图8-14所示的两种机构中,已知O1O2=a=200mm,ω1=3rad/s。求在图示位置时杆O2A的角速度。
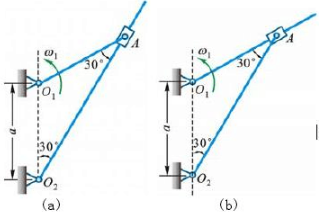
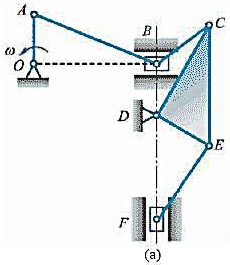
图9-8a所示机构中,已知:OA=BD=DE=0.1m,EP= ;ωOA=4rad/s。在图 9-8a所示位置时,曲柄OA与水平线OB垂直;且B,D和F在同1铅直线上,又DE垂直于EF求杆EF的角速度和点F的速度。
;ωOA=4rad/s。在图 9-8a所示位置时,曲柄OA与水平线OB垂直;且B,D和F在同1铅直线上,又DE垂直于EF求杆EF的角速度和点F的速度。